CẢM BIẾN MÔ-MEN XOẮN SỬ DỤNG CÔNG NGHỆ TỪ GIẢO NGHỊCH INVERSE MAGNETOSTRICTION (PHẦN 2)
Trong phần 1 chúng ta đã tìm hiểu nguyên lý cũng như sơ lược về cảm biến mô-men xoắn sử dụng công nghệ từ giảo nghịch inverse magnetostrition. Trong phần này, hãy cùng tìm hiểu rõ hơn về cấu tạo cũng như ưu điểm của cảm biến NCTE nhé!
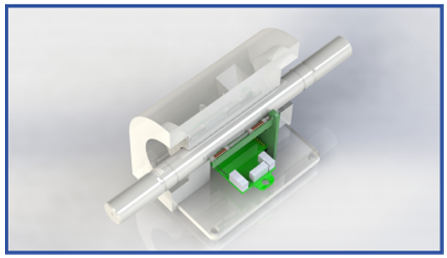
Một cảm biến lực và mô-men xoắn của NCTE bao gồm bộ phận trục được tích từ (cảm biến sơ cấp) và một thiết bị đọc (cảm biến thứ cấp) được thiết kế theo từng ứng dụng riêng biệt.
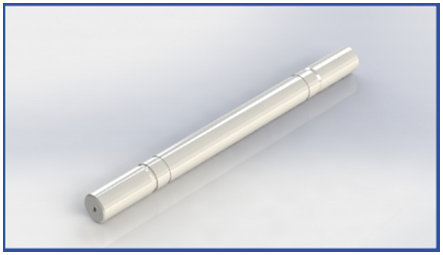
Bộ phận trục được xem như cảm biến sơ cấp
Bộ phận chủ chốt của cảm biến không tiếp xúc là bộ phận truyền mô-men xoắn hoặc lực. Có thể là trục của máy đùn, của tay lái hoặc hộp số của xe.
Bởi vì trục được sản xuất bằng nhiều bước nên có thể tích từ trước đó, ví dụ như nhiệt luyện hoặc ép từ. Để có được trạng thái chuẩn nhất trước tiên trục sẽ được làm sạch và tích từ trở lại (Bước 1).
Sau đó, trục sẽ được mã hóa từ bởi một quá trình do NCTE sáng chế được gọi là mã hóa dòng xung điện từ.
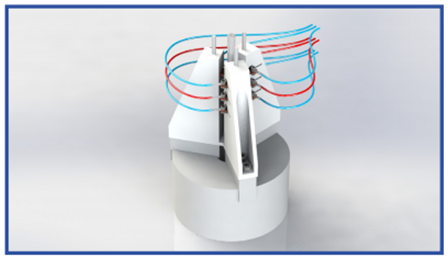
Quá trình mã hóa này làm cho trục trở thành một cảm biến sơ cấp. Để tạo ra từ trường vĩnh cữu, dòng xung qua trục phải bằng với phương của từ trường. Dòng điện thường có độ lớn khoảng vài kilo-ampe và dựa vào đường kính trục. Quá trình này thường mất vài giây. Và từ trường sẽ có độ ổn định (bước 2).
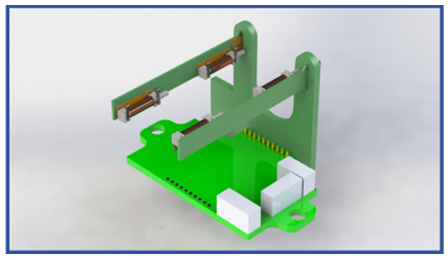
Cảm biến thứ cấp
Bộ phận đọc là một cảm biến cố định nhỏ được dùng để đo sự thay đổi của từ trường mà không cần tiếp xúc ở khoảng cách vài mili-mét. Mô-men dẫn của từ trường thay đổi rất nhỏ (150 μT – 200 μT) vì thế phải được đo bằng một thiết bị chính xác. Thiết bị này gồm cảm biến từ trường cũng như các linh kiện điện tử và vỏ không nhiễm từ (Bước 3).
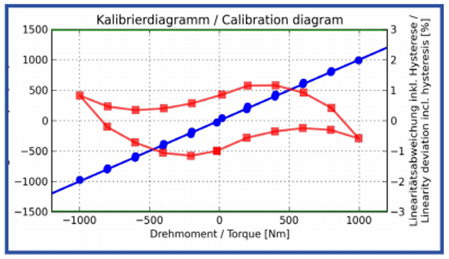
Bước áp cuối là hiệu chuẩn cảm biến. Quá trình hiệu chuẩn toàn bộ hệ thống cảm biến chỉ trong vài giây và dùng chung được cho các dòng sản phẩm (Bước 4).
Ở bước cuối cùng, cảm biến sơ và thứ cấp đã được hợp thành một khối hoàn chỉnh (Bước 5). Hệ thống được thiết kế cho những ứng dụng có khoảng không nhỏ nhất. Các linh kiện điện tử thậm chí có thể đặt phía bên trong trục.
Ưu điểm của cảm biến mô-men xoắn magnetostriction:
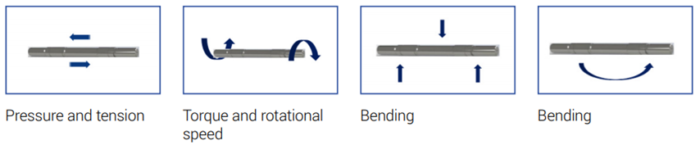
Công nghệ từ giảo cho phép đo mô-men xoắn, lực, độ biến dạng hoặc bẻ cong (tĩnh/động) mà không tiếp xúc. Công nghệ từ trường cũng có thể so sánh vơi các kỹ thuật đo truyền thống như đo tốc độ quay hoặc phương pháp bù nhiệt chủ động.
Những đặc điểm của công nghệ không tiếp xúc:
- Cảm biến sơ cấp là bộ phận trục có sẵn, cảm biến thứ cấp có thể được thiết kế để phù hợp.
- Phép đo không tiếp xúc – không có hao mòn cũng như dây/cáp.
- Quá trình mã hóa từ được cấp bằng sáng chế có tính ổn định lâu dài.
Thuận lợi cho người dùng:
- Không cần phải thay đổi thiết kế của trục ban đầu; khác hàng luôn kiểm soát được các đặc tính cơ khí và tiết kiệm được chi phí.
- Cảm biến thứ cấp chiếm rất ít không gian và có thể được điều chỉnh cho các trường hợp khác nhau thậm chí phía bên trong trục.
- Với giá thành hợp lý, công nghệ này phù hợp cho cả lĩnh vực kiểm tra và sản xuất.
- Cảm biến mang lại phép đo chính xác ngay cả khi có sự rung lắc mạnh, nhiệt độ có thể lên đến 125°C và với tải nhiệt độ lâu dài và tốc độ quay trên 40,000 rpm. Thậm chí sự xuất hiện của dầu hoặc nước cũng không thay đổi chức năng của cảm biến.
- Phương pháp đo sử dụng từ trường không cần phải bảo trì thậm chí hiện tượng quá tải cũng không thể phá hủy được cảm biến.