

Điều khiển và truyền động ba pha PMSM PEK-190
Động cơ đồng bộ nam châm vĩnh cửu, sau đây gọi là PMSM, được sử dụng rộng rãi trong các lĩnh vực bao gồm thiết bị sản xuất tự động, cung cấp điện công nghiệp và kinh doanh, động cơ máy nén và máy làm đá điều hòa không khí, xe điện (EV), phát điện liên quan đến năng lượng xanh, cùng với những ứng dụng khác.
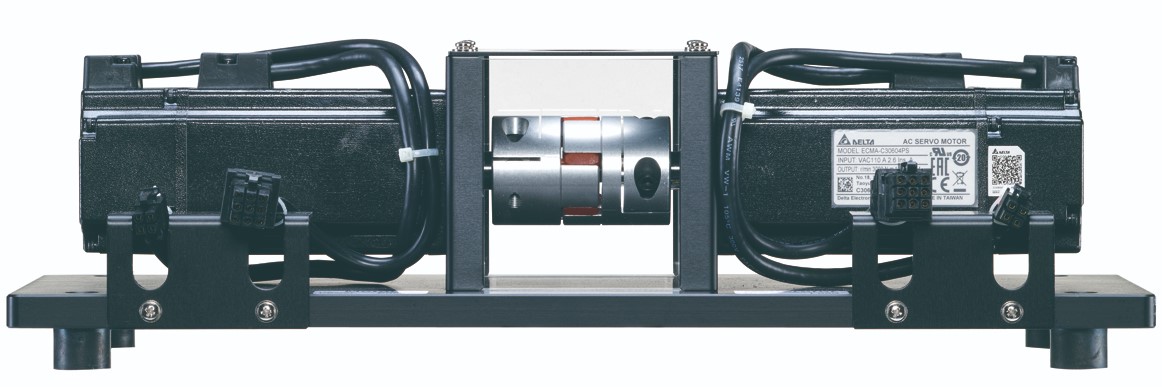
Mô-đun PEK-190, không chỉ cung cấp biến tần điều khiển động cơ, mà còn cung cấp cả PMSM (cả động cơ điện và máy phát điện), cho phép người dùng nhận thức sâu sắc công nghệ điều khiển truyền động của PMSM thông qua các quy trình phân tích, thiết kế, mô phỏng, mạch sản xuất, mã hóa phần mềm, xác minh thử nghiệm, v.v.
Các bài thí nghiệm như sau:
- Thí nghiệm 1: Kiểm soát véc tơ của PMSM
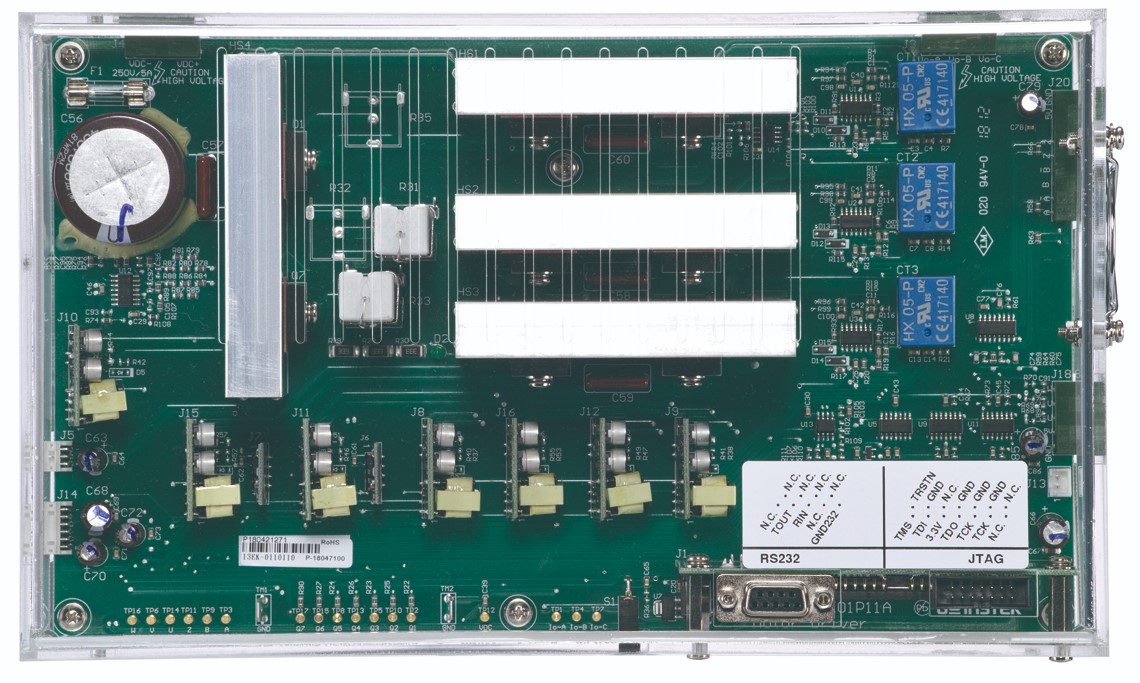
Để chủ yếu giáo dục công nghệ Điều chế độ rộng xung vectơ không gian (Space Vector Pulse Width Modulation – SVPWM). Để hiểu, thông qua mô-đun PEK-190, phương pháp đo cả điện áp và dòng điện, đồng thời tìm hiểu chân của TI F28335 DSP IC, PWM và cài đặt phần cứng A/D. Ngoài ra, để biết cách sử dụng RS-232 để đo và kiểm soát tín hiệu bên trong DSP. - Thí nghiệm 2: Xác định tham số của PMSM
Chủ yếu hướng dẫn cách truy xuất thông tin vị trí rôto ban đầu PMSM một cách chính xác để có thể đạt được khả năng khởi động ổn định cho động cơ. Để mang đến tính năng phát hiện vị trí rôto ban đầu PMSM hoàn toàn mới cho cả khởi động ổn định và vận hành đáng tin cậy của động cơ. Ngoài ra, nó tiếp tục, thông qua SimCoder, mã hóa chương trình sau khi vạch ra phần cứng một cách thích hợp. - Thí nghiệm 3: Phát hiện góc ban đầu và bắt đầu PMSM
Chủ yếu hướng dẫn cách ước tính trở kháng động cơ, điện kháng cảm ứng, phản kháng và các thông số cơ học của động cơ bao gồm mô-men xoắn, rôto quán tính, hằng số cơ học. Ngoài ra, để tìm hiểu, thông qua SimCoder, mã hóa chương trình sau khi vạch ra thuật toán thích hợp. - Thí nghiệm 4: Điều khiển PMSM không cần cảm biến vị trí với Bộ quan sát chế độ trượt (SMO)
Để tìm hiểu “bộ quan sát chế độ trượt thông thường” và viết mã chương trình qua SimCoder. - Thí nghiệm 5: Điều khiển PMSM không cần cảm biến vị trí với Trình quan sát chế độ trượt tự thích ứng
Để tìm hiểu “trình quan sát chế độ trượt thích ứng” và viết mã chương trình qua SimCoder. - Thí nghiệm 6: Điều khiển PMSM không cần cảm biến vị trí với Hệ thống thích ứng tham chiếu mô hình quan sát (MRAS)
Để tìm hiểu “điều khiển thích ứng tham chiếu mô hình” và viết mã chương trình qua SimCoder.
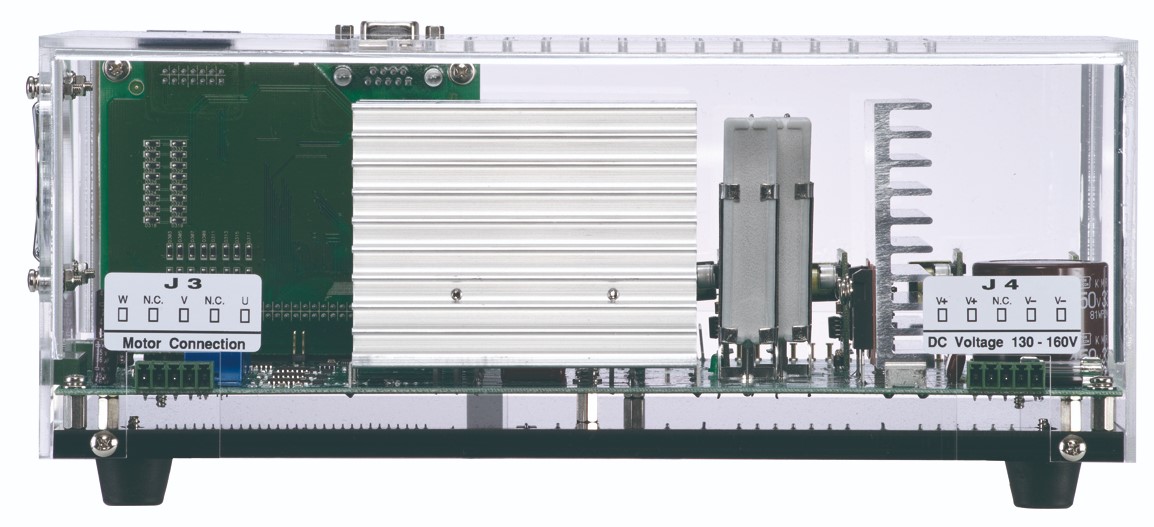
Thông số kỹ thuật
| Mô tả | Ký hiệu | Tối thiểu | Tiêu chuẩn | Tối đa | Đơn vị | |
| Ngõ vào DC | Điệp áp |
V_in |
130 | 140 | 150 |
V |
| Dòng điện |
I_in |
2.6 |
A |
|||
| Ngõ ra AC | Điện áp |
VL-L |
45 | 65 |
V |
|
| Dòng điện |
I_out |
3 |
A |
|||
| Công suất |
P_out |
300 |
W |
|||
| Kích thước (LxWxH) mm | 285x170x110 | |||||
| Trọng lượng | Xấp xỉ 2.5 kg | |||||
Để biết thêm thông tin, vui lòng tham khảo tại đây!