

THREE PHASE PMSM DRIVE AND CONTROL
Permanent-magnet synchronous motor, hereinafter referred to as PMSM, is widely utilized in the areas covering automatic production equipment, industry and business power supply, refrigerating air-conditioning ice maker and compressor motor, electric vehicle (EV), green energy related power generation, among others. PMSM, of which the drive and control that collectively dominate the expected performance and efficiency of system and play the key role in core technology leading to product development, has vast potentials in diverse markets.
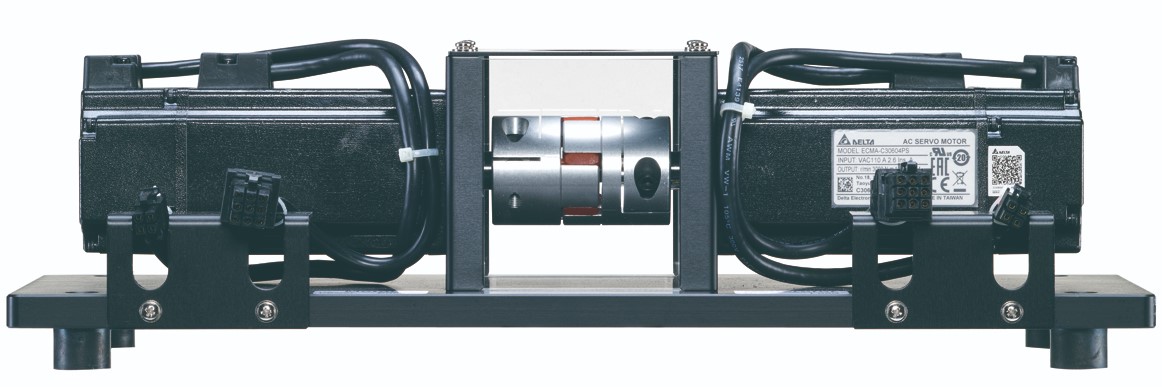
PEK-190 module, not only providing motor-drive inverter, but offers PMSM (both electric motor and power generator) as well, which empowers user to profoundly realize the drive control technology of PMSM via the processes of analysis, design, simulation, circuit production, software coding, experimental verification, etc.
SPECIFICATIONS:
- Experiment 1 : Vector Control of PMSM
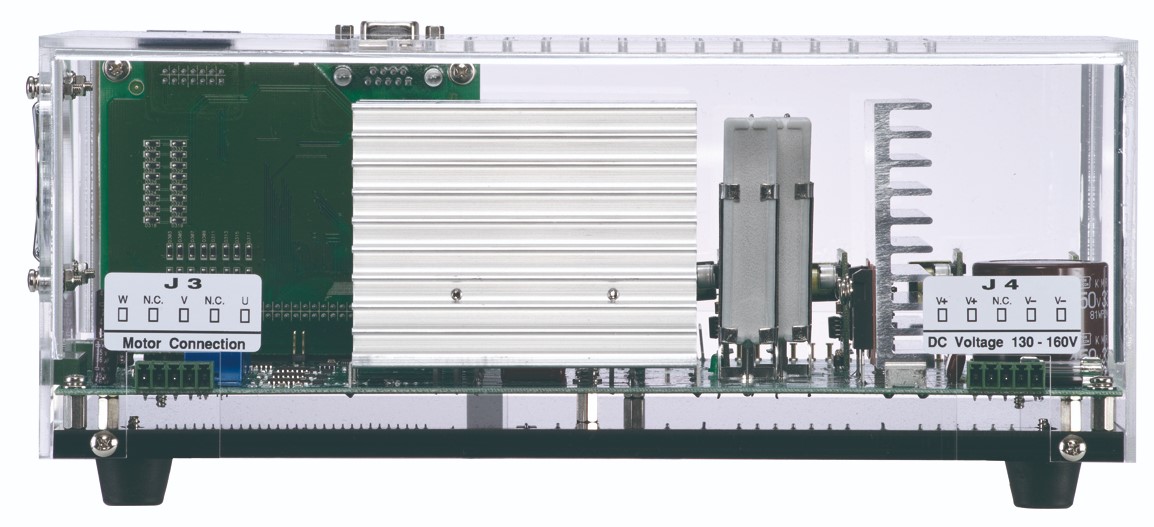
To mainly educate the Space Vector Pulse Width Modulation (SVPWM) technology. To understand, via PEK-190 module, the measuring method of both voltage and current, and learn the pin of TI F28335 DSP IC, PWM and A/D hardware settings. Also, to realize the way how to utilize RS-232 for DSP internal signal control and measurement. - Experiment 2 : Parameter Identification of PMSM
To mainly educate the way to retrieve the PMSM initial rotor position info precisely so that stable startup for motor can be achieved. To bring up a brand-new PMSM initial rotor position detection for both steady startup and credible operation of motor. In addition, it proceeds to, via SimCoder, program coding after mapping out the hardware appropriately. - Experiment 3 : Initial Angle Detection and Starting of PMSM
To mainly educate how to estimate motor impedance, inductive reactance, counter emf, and mechanical parameters of motor including torque, rotor of inertia, mechanical constant. In addition, to learn, via SimCoder, program coding after mapping out the algorithm appropriately. - Experiment 4 : Position Sensor-less Control of PMSM with Sliding Mode Observer (SMO)
To learn “conventional sliding-mode observer” and program coding via SimCoder. - Experiment 5 : Position Sensor-less Control of PMSM with Self-adaptive Sliding Mode Observer
To learn “adaptive sliding-mode observer” and program coding via SimCoder. - Experiment 6 : Position Sensor-less Control of PMSM with Model Reference Adaptive System (MRAS) Observe
To learn “model reference adaptive control” and program coding via SimCoder.
Specification
| Description | Symbol | Min | Typ | Max | Units | |
| DC Input | Voltage |
V_in |
130 | 140 | 150 |
V |
| Current |
I_in |
2.6 |
A |
|||
| AC Output
(Inverter Output) |
Voltage |
VL-L |
45 | 65 |
V |
|
| Current |
I_out |
3 |
A |
|||
| Power |
P_out |
300 |
W |
|||
| Dimensions (LxWxH) mm | 285x170x110 | |||||
| Weight | Approx 2.5 kg | |||||
More detail, here!